קובץ:Cyclope robot.jpg

גודל התצוגה המקדימה הזאת: 800 × 500 פיקסלים. רזולוציות אחרות: 320 × 200 פיקסלים | 640 × 400 פיקסלים | 1,024 × 640 פיקסלים | 1,280 × 800 פיקסלים | 2,036 × 1,272 פיקסלים.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
לקובץ המקורי (2,036 × 1,272 פיקסלים, גודל הקובץ: 961 ק"ב, סוג MIME: image/jpeg)
| זהו קובץ שמקורו במיזם ויקישיתוף. תיאורו בדף תיאור הקובץ המקורי (בעברית) מוצג למטה. |
{kind=link}
{kind=link}
| תיאור |
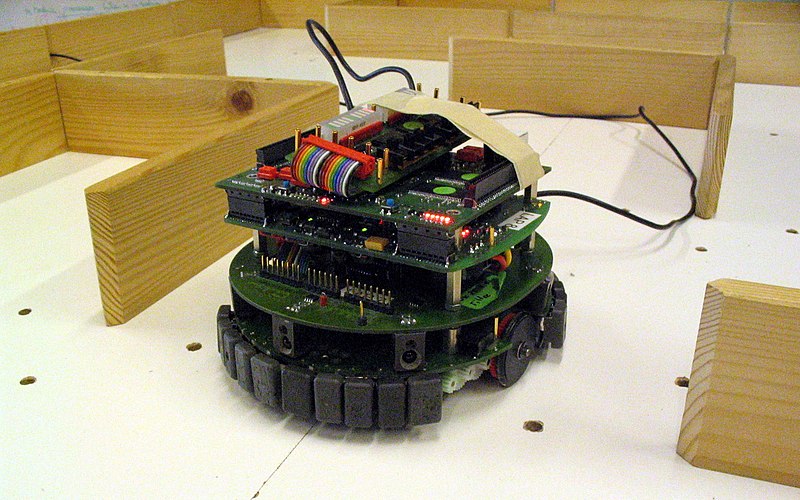
English: Blind "Cyclope" in a maze at EPFL / Switzerland. Moving with Braitenberg-style activation rules and a small FSM.
The Cyclope is a low cost didactic robot, with a nice set of sensors for doing students labs on assembly language and sensor drivers. The version on the picture is an enhanced Cycloped based on the "RokEPXA" card developped at EPFL. The FPGA is an Altera EPXA1. RokEPXA is a minimal board using A-BUS compatible power-supply. RokEPXA replaces old main boards RokHC12 and Rok68 of the robot Cyclope and opens a new era. Altera EPXA integreted circuit contains an "hardcore" ARM922T processor system and a FPGA. This board can not only be used with the robot Cyclope but in many others applications. Now, it's possible to build a multi-processor system using Altera NIOS "softcore" processor system in FPGA, for example. |
| מקור | More info here : http://lapwww.epfl.ch/dev/arm/index.php?presentation |
| יוצר | Picture taken by Dake |

|
מוענקת בכך הרשות להעתיק, להפיץ או לשנות את המסמך הזה, לפי תנאי הרישיון לשימוש חופשי במסמכים של גנו, גרסה 1.2 או כל גרסה מאוחרת יותר שתפורסם על־ידי המוסד לתוכנה חופשית; ללא פרקים קבועים, ללא טקסט עטיפה קדמית וללא טקסט עטיפה אחורית. עותק של הרישיון כלול בפרק שכותרתו הרישיון לשימוש חופשי במסמכים של גנו. |
| הקובץ הזה מתפרסם לפי תנאי רישיון קריאייטיב קומונז ייחוס-שיתוף זהה 3.0 לא מותאם. | ||
| ||
| תבנית רישוי זו הוספה לקובץ כחלק מעדכון רישיון GFDL. |
היסטוריית הקובץ
ניתן ללחוץ על תאריך/שעה כדי לראות את הקובץ כפי שנראה באותו זמן.
| תאריך/שעה | תמונה ממוזערת | ממדים | משתמש | הערה | |
|---|---|---|---|---|---|
| נוכחית | 21:07, 9 ביולי 2008 | | 1,272 × 2,036 (961 ק"ב) | Mysid | white point reset & crop |
| 23:49, 27 באוגוסט 2005 |  | 1,536 × 2,048 (983 ק"ב) | Dake~commonswiki | Blind "Cyclope" in a maze at EPFL / Switzerland. Moving with Braitenberg-style activation rules and a small FSM. The Cyclope is a low cost didactic robot, with a nice set of sensors for doing students labs on assembly language and sensor drivers. |
שימוש בקובץ
הדף הבא משתמש בקובץ הזה:
שימוש גלובלי בקובץ
אתרי הוויקי השונים הבאים משתמשים בקובץ זה:
- שימוש באתר ca.wiki.x.io
- שימוש באתר de.wiki.x.io
- שימוש באתר en.wiki.x.io
- שימוש באתר es.wiki.x.io
- שימוש באתר fa.wiki.x.io
- שימוש באתר fi.wiki.x.io
- שימוש באתר fr.wiki.x.io
- שימוש באתר it.wiki.x.io
- שימוש באתר nl.wiki.x.io
- שימוש באתר uk.wiki.x.io
- שימוש באתר vi.wiki.x.io
- שימוש באתר wuu.wiki.x.io
- שימוש באתר zh-yue.wiki.x.io
- שימוש באתר zh.wiki.x.io
{kind=link}